 NPS ROBOTICS COMPUTER ศูนย์พัฒนาเด็กเพื่อเป็นโปรแกรมเมอร์-วิศวกรคอมพิวเตอร์ จังหวัดระยอง
NPS ROBOTICS COMPUTER ศูนย์พัฒนาเด็กเพื่อเป็นโปรแกรมเมอร์-วิศวกรคอมพิวเตอร์ จังหวัดระยอง

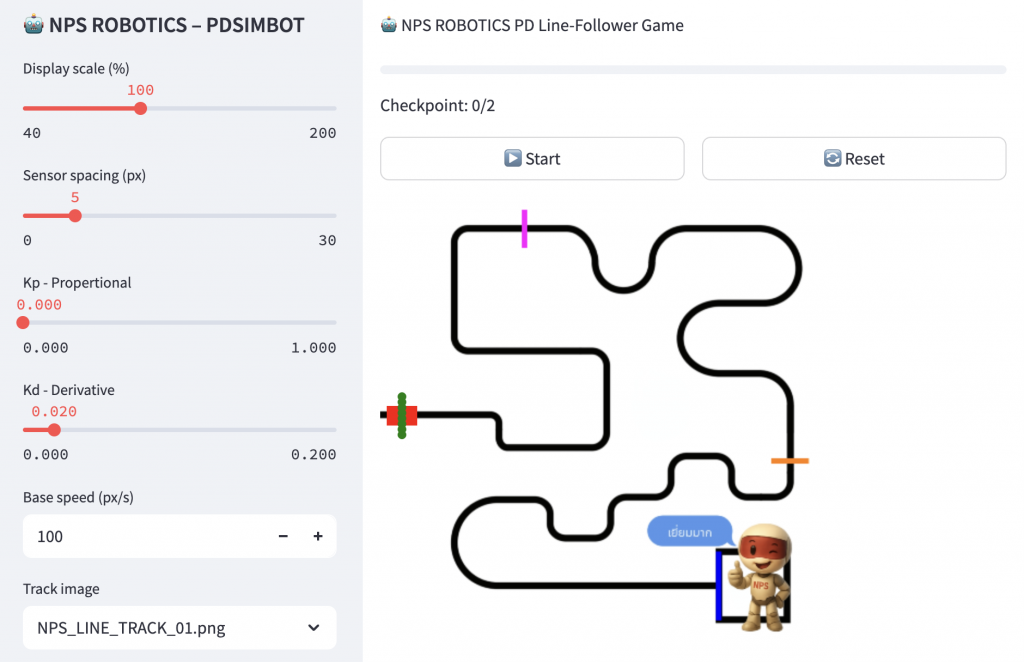
🧠 NPS Robotics | PD Line-Follower Simulator Game
จำลองหุ่นยนต์เดินตามเส้น พร้อมระบบ PD Controller และเซ็นเซอร์ 8 ตัว!
✅ จุดเด่นของระบบ
🎮 การควบคุมแบบเรียลไทม์
- ปรับค่า Base Speed, Kp, และ Kd ขณะวิ่งได้ทันที
👁 เซ็นเซอร์สะท้อนแสง 8 ตัว
- ตรวจจับเส้นดำ/พื้นหลังอย่างแม่นยำ
- ปรับระยะห่างระหว่างเซ็นเซอร์ได้เอง
📏 ปรับมุมมองสนามได้ตามต้องการ
- ยืด/ขยายการแสดงผลเพื่อดูเส้นทางได้ชัดเจนยิ่งขึ้น
🏁 ระบบ Checkpoint และ Finish Line
- ตรวจจับความคืบหน้าผ่าน สีเฉพาะ:
- 🟣 Checkpoint 1 (ม่วงชมพู)
- 🟠 Checkpoint 2 (ส้ม)
- 🔵 Finish Line (น้ำเงิน)
🧭 ตรวจจับการหลุดเส้นอัตโนมัติ
- ป้องกันหุ่นยนต์ออกนอกเส้นทาง
⏱ ระบบจับเวลาแบบ Lap Timing
- ดูเวลาการวิ่งแต่ละรอบได้เพื่อปรับปรุงประสิทธิภาพ
🧩 รองรับแผนที่สนามแบบกำหนดเอง
- แนะนำขนาด: 800×800 px
- สร้างสนามฝึกซ้อมหรือการแข่งขันได้ตามใจ
NPS PD Line-Follower Simulator ออกแบบเพื่อส่งเสริมการเรียนรู้ระบบควบคุมหุ่นยนต์โดยใช้ PD Algorithm และสร้างความเข้าใจการทำงานของเซ็นเซอร์ในสถานการณ์จำลองเสมือนจริง
📦 ดาวน์โหลดและดูซอร์สโค้ด
🎮 ทดลองใช้งานออนไลน์
🌐 ทดลองเล่นได้ทันที:
👉 https://www.npsrobot.com/pidrobotgames/